
プリセールスシミュレーションプラットフォームは、さまざまな顧客のニーズを満たします。パターン認識やデータマイニングなどの最先端の人工知能アルゴリズムを採用し、過去のデータを組み合わせ、迅速に計画やオプションを作成します。自動的に作成されるシミュレーションレポートとシミュレーションビデオは、顧客が最も適切で経済的なインテリジェントウェアハウスロボットソリューションを選択するのに役立ちます。
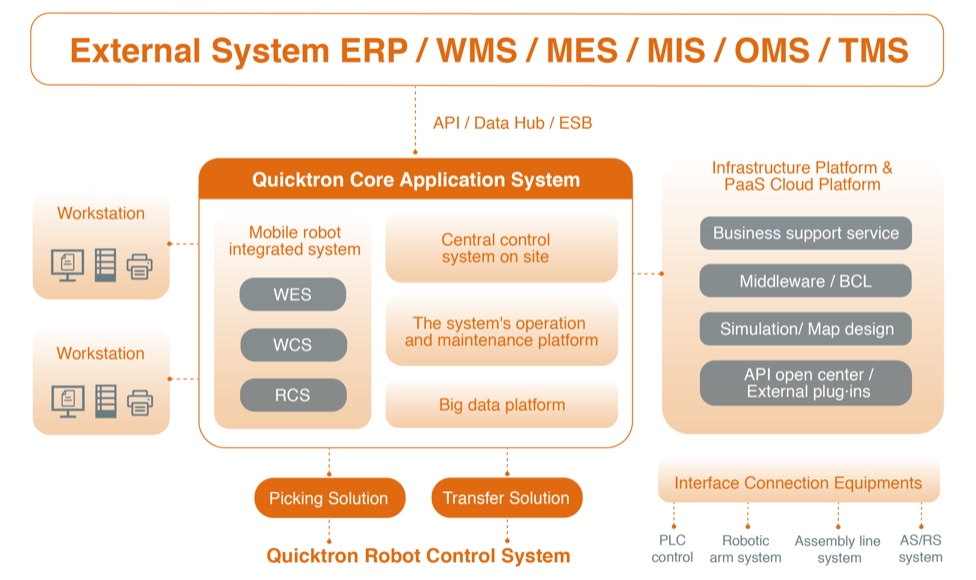
EVOソフトウェアシステムは、最適なリソース配分、負荷分散、在庫分配、複数デバイスの連携、スケジュールやナビゲーション制御のためのトラフィック制御を可能にし、システムの効率を最大化します。
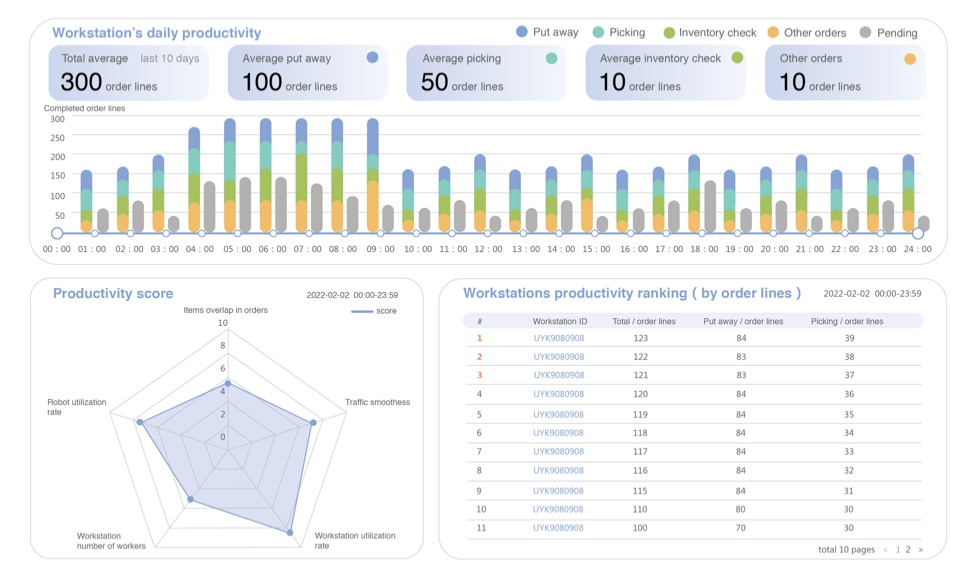
タスクの実行効率、ハードウェアの状態、トラフィックをリアルタイムで監視するインテリジェントなビッグデータプラットフォームは、お客様にとって「スマートアシスタント」となり、プロジェクトの運用状況を的確に把握することができるのです。インテリジェントな対話型インターフェース、ユーザーへの親切でタイムリーな操作アドバイスにより、お客様にリラックスしていただける快適な作業環境を実現します。
最先端のファジーエキスパートアルゴリズム、待ち行列理論、対策理論に基づき、車両の走行経路を動的に調整することで、渋滞解消効率を最大化し、ロボットの高速走行の円滑性を維持します。

クイックトロンインテリジェントアルゴリズムは、複数のデバイスのコラボレーションソリューションに焦点を当てています。コンテナから人へ(QuickBin)、効率的なコラボレーションは、より豊かで、経済的で、柔軟なソリューションを顧客に提供します。
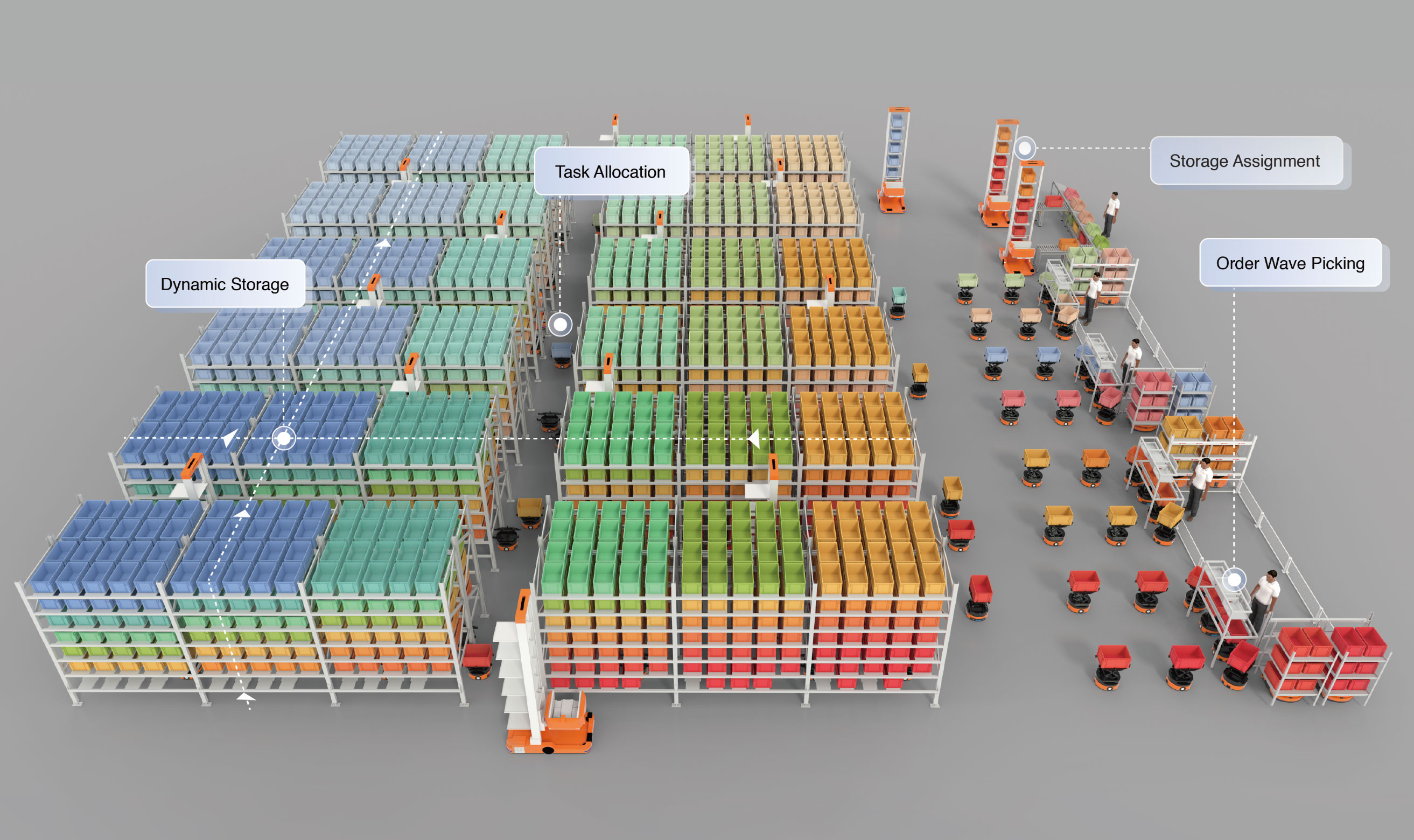
大量の過去の注文データに基づいて、将来の注文需要を予測し、アクティブとリアルタイムのシフトを組み合わせ、棚の最適な位置に配置し、ピッキングステーションから棚までの距離を最小限に抑えます。 「1倉庫1ポリシー」から「1製品1ポリシー」、「1車両1ポリシー」から「1ライン1ポリシー」まで、倉庫保管と配送の効率を最大化します。
商品のサイズやパッケージを分析・最適化することで保管スペースの利用率を高め、1つの棚に収納できる商品数を効果的に増やし、SKUヒット率を大幅に向上させます。 アウトバウンド相関の商品の集中保管システムは、アウトバウンド注文のビッグデータ分析を実行し、アウトバウンド相関の商品の棚を体系的にガイドし、同じ棚と同じ側に保管して、棚のヒット率を向上させます。
ピッキング履歴に基づいて、さまざまなSKUの人気度とSKU間の関連度をマイニングし、これに基づいて棚を推奨し、在庫分布を最適化します。これにより、ピッキングの効率を向上させます。
棚搬送タスクにAGVを割り当てる場合、全体的な処理距離だけでなく、倉庫エリア、ワークステーション、タスクタイプ、およびその他の要素の負荷分散も考慮されます。さらに、運用中のAGVステータスを検知することにより、動的なタスク割り当てとAGVの迂回や問題を減らすために調整が行われます。アイドル間隔により、全体的な作業効率が向上します。
ナビゲーションが異なる複数車両の混合シナリオでは、移動コストを最小限に抑えて最適な経路を計画し、ユーザーの誤操作などの異常な状況が発生した場合にすばやく再計画モードに切り替えて、ロボットの交通効率を最大化します。

電子カタログ
YouTube公式チャンネル
TikTokアカウント